神经形态计算在机器人导航中的应用:为何二十年的承诺终于成为现实
经过数十年的未实现承诺,神经形态计算终于解决了自主机器人导航问题,功耗比传统AI降低了100倍。这一突破源于解决了历史上阻碍部署的三个关键障碍:缺乏适用于脉冲神经网络的训练算法、芯片间扩展性差以及软件工具链有限。
经过数十年的未实现承诺,神经形态计算终于解决了自主机器人导航问题,功耗比传统AI降低了100倍。这一突破源于解决了历史上阻碍部署的三个关键障碍:缺乏适用于脉冲神经网络的训练算法、芯片间扩展性差以及软件工具链有限。
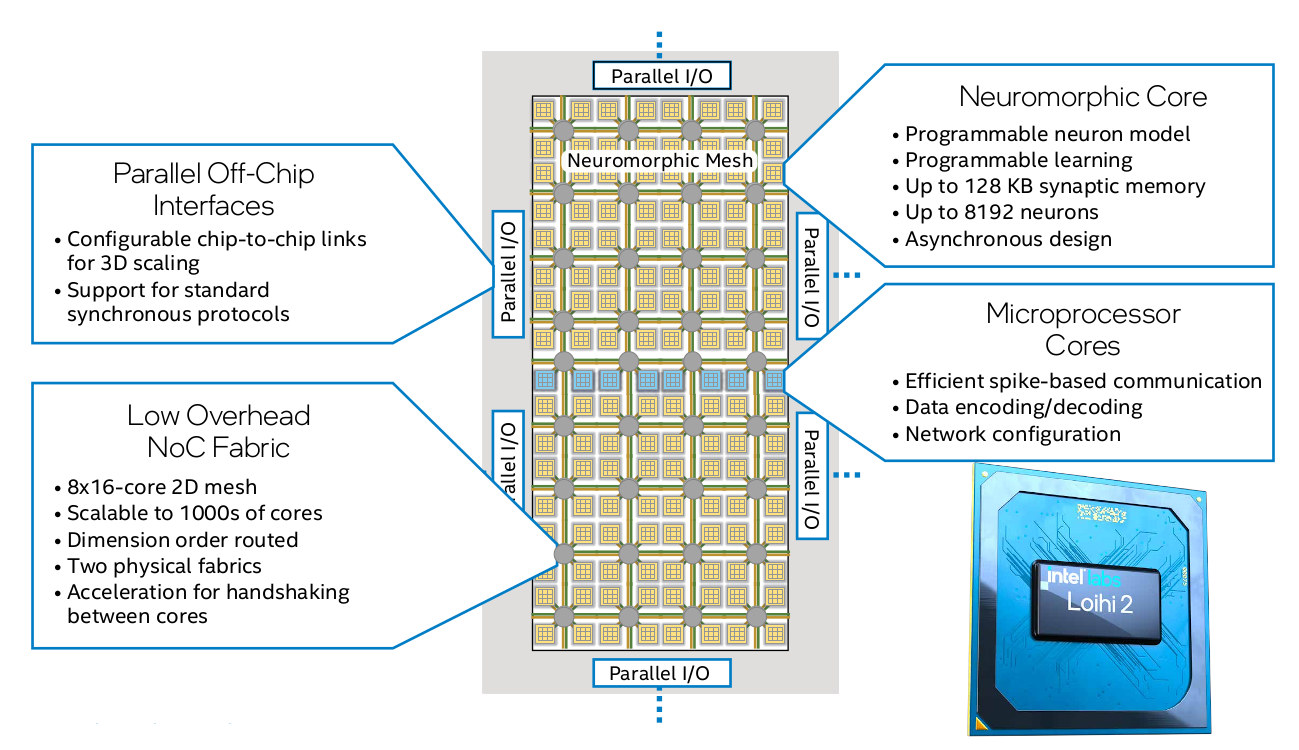
Intel 的 11.5 亿神经元系统 Hala Point 与 IBM 的 NorthPole 正在改写能效规则——但神经形态计算仍需找到它的杀手级应用。